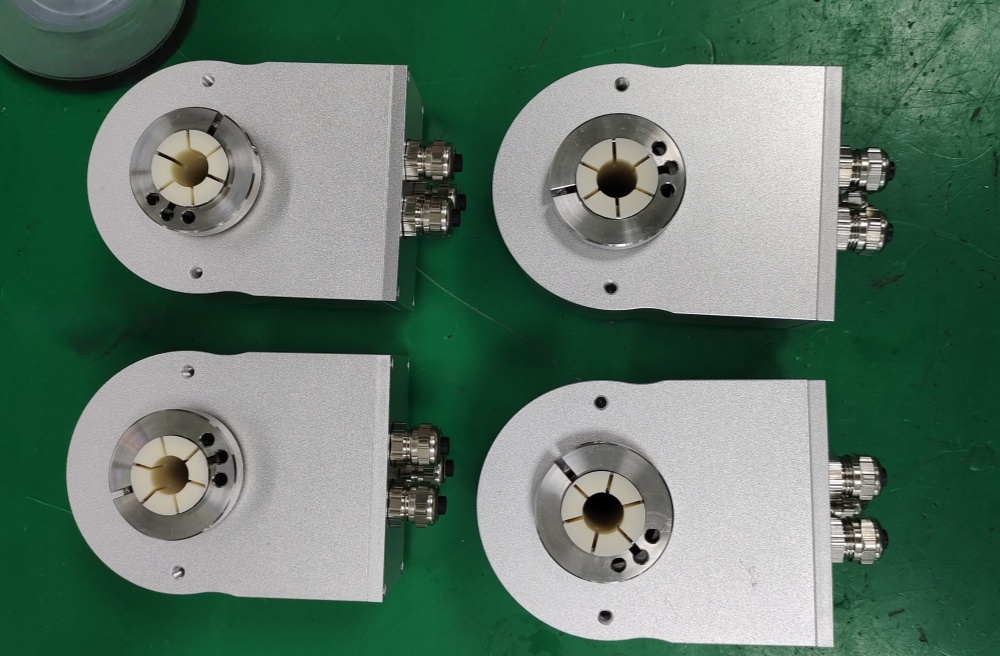


For the CR58-1024G18E03 parallel absolute encoder, we provide a specialized technical replacement solution developed through precision non-standard customization. This program is created for industrial users facing discontinued supply, limited distribution channels, or extended procurement cycles. The encoder is engineered to replicate the original housing structure, mounting pattern, shaft tolerance, and parallel output configuration. Each critical parameter is carefully aligned to ensure seamless mechanical compatibility and electrical consistency. The replacement unit supports direct installation without mechanical redesign or control system modification. Standard delivery time is maintained within 15 working days, helping reduce production downtime and simplify spare parts planning.
This solution has been successfully implemented in various automation and positioning systems operating under demanding conditions. Customers in multiple international markets rely on its stable signal transmission, accurate position feedback, and durable mechanical construction. The balanced integration of performance reliability and cost control makes it a practical option for long-term equipment lifecycle support. By optimizing internal workflow coordination and quality inspection procedures, we ensure predictable manufacturing cycles and dependable operational performance, enabling efficient maintenance execution in time-sensitive industrial environments.


Technical data
| Parameter | Value |
|---|---|
| Resolution | 2 to 4096 positions / 360° |
| Measuring range | 2 to 4096 turns |
| Total number of positions | |
| Measurement position deviation | |
| Output frequency* | 30 kHz max. up to 10 Bit / 360°; 10 kHz max. from 11 Bit |
| Disc coding | Gray code |
| Output code, parallel | Gray or Natural Binary |
| Code sense, serial | CW or CCW (Signal input E2) |
| Logic polarity | Positive |
| Memory circuit | Store or not store, signal input E1 |
| Enable circuit (for bus operation) | Active or inactive, (signal input E1) |
| Sensor system | GaAlAs diodes, photo-transistor array |
| Parallel output circuits | A = Open collector Darlington; B = Open collector, TTL compatible; C = Open emitter Darlington; D = Push-pull, Totem-pole |
| Serial output SSI | Differential data output to RS 422 |
| Clock input SSI | Differential (opto-coupler) for data driver to RS 422 |
| Supply voltage range | +11 V to +26 VDC |
| Supply current | Parallel: 90 mA typ. / 120 mA max.; Serial GSI: 130mA typ. / 160mA max. |
| Operating speed | 3000 rpm max. (continuous); 4000 rpm max. (short period) |
| Angular acceleration | 10° rad/s² max. |
| Inertial mass of rotor | ≤ 5 Ncm (8 Ncm - CR 66) |
| Wind-up torque | ≤ 1 Nm (4 Ncm - CR 66) |
| Permissible axial and radial shaft load | 250 N max. |
| Bearing life expectancy | 10⁹ revolutions |
| Operating temperature range | -20°C to +60°C |
| Storage temperature range | -25°C to +70°C |
| Permissible rel. humidity | 85% without condensation |
| Resistance to shock | 200 m/s², 11 ms (DIN IEC 68) |
| Resistance to vibration | 5 Hz..1000 Hz; 100 m/s² (DIN IEC 68) |