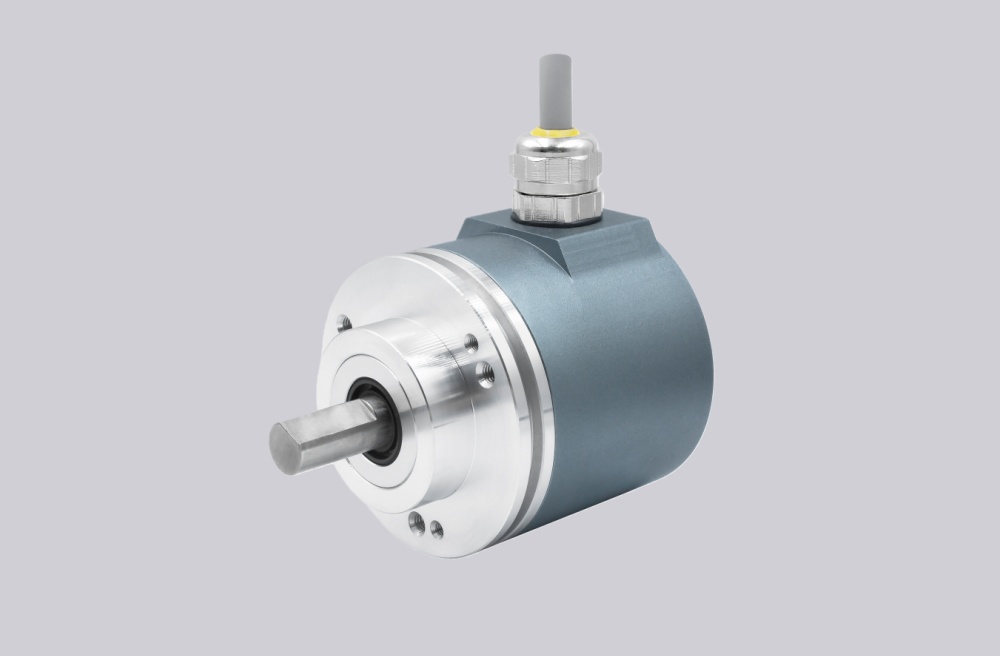


We provide a dedicated replacement solution for the CBE66-4096GKE17 encoder, developed to ensure stable long-term availability for equipment that depends on this high-resolution configuration. The replacement is produced with a fixed ten-working-day lead time and accurately reproduces the original encoder’s mechanical structure, coupling method, and electrical output characteristics. This guarantees direct installation into existing systems without recalibration, rewiring, or mechanical adaptation.
With a 4096-resolution design, this encoder delivers precise position feedback for servo control systems, automated inspection platforms, synchronized drive units, and multi-axis motion applications. Optimized signal routing and enhanced noise suppression improve data integrity under rapid acceleration and continuous-duty operation. Reinforced housing design, upgraded bearing components, and improved sealing performance support reliable operation in harsh industrial environments, making this replacement solution a dependable option for both accuracy and supply continuity.


Technical data
| Sensor system | GaAlAs diodes, photo-transistor array |
| Resolution | 4096 positions / 360°; 8192 positions / 360° (optional); 3600 positions / 360° (optional) |
| Data Control - Bit (DCB) | Optional at ≤ 4096 positions |
| Disc coding | Gray or Gray - Excess |
| Measuring position deviation | ≤ ± 2'38'' at 4096 positions / 360°; ≤ ± 1'59'' at 8192 positions / 360° |
| Parallel output circuits | A = Open Collector Darlington; C = Open Emitter Darlington; D = Push - pull |
| Output frequency | 10 kHz max. |
| Latch | via signal input E1 |
| Enable circuit | on / off, via signal input E1 |
| Serial output circuit | E = SSI Differential to RS 422 / 485 |
| Output Code | Gray or Gray - Excess for non - binary outputs |
| Code sense | CW or CCW, via signal input E2 |
| Supply voltage range | +11 VDC to +30 VDC |
| Supply current (parallel) | 50 mA typ. / 70 mA max. |
| Supply current (serial SS) | 60 mA typ. / 80 mA max. |
| Operating speed | 3000 rpm max. (continuous); 4000 rpm max. (short period) |
| Angular acceleration | 10⁵ rad/s² max. |
| Inertial mass of rotor | 45 gcm² |
| Operating torque | ≤ 5 Nm (8 Nm - CBE 66) (at 1000 rpm) |
| Wind - up torque | ≤ 1 Nm (4 Nm - CBE 66) |
| Permissible axial and radial shaft load | 250 N max. |
| Bearing life expectancy | 10⁹ turns |
| Mass | 0.5 kg |