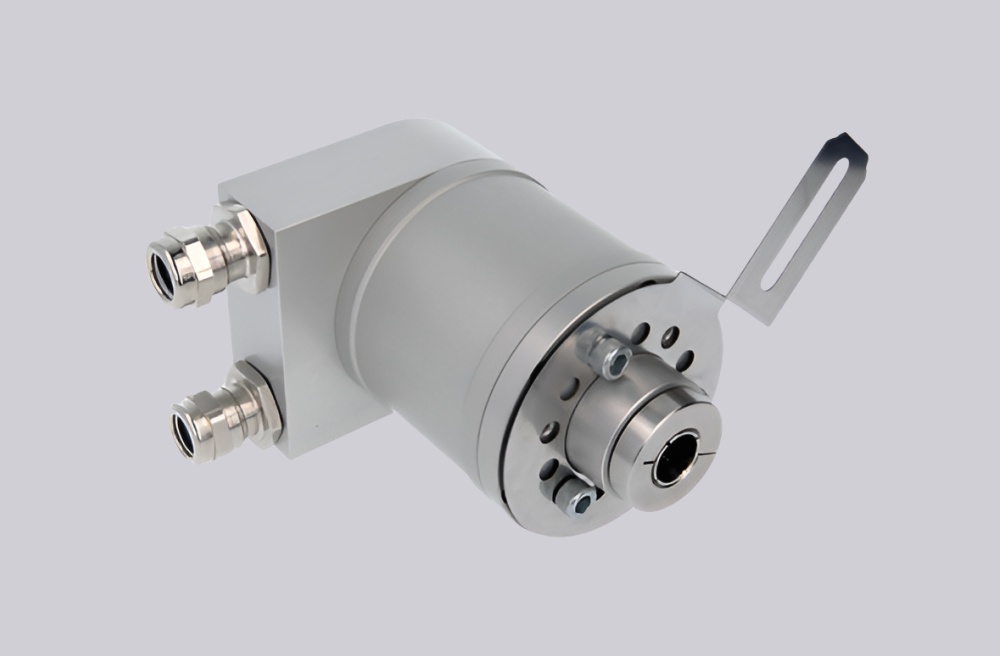


The CBE65-4096GKC01 Parallel Encoder Replacement Model is developed as a strict 1:1 alternative for equipment that relies on this specific parallel-output configuration. Using dedicated non-standard manufacturing, the encoder is built to align precisely with the original unit’s form factor, interface layout, and signal logic. This approach allows maintenance teams to complete replacements quickly, even in systems where design changes or parameter reconfiguration are not an option. It is especially suitable for production environments affected by long procurement cycles or limited availability of the original encoder.
In operation, this replacement model delivers stable and repeatable position feedback for automation lines, synchronized motion platforms, and legacy control systems that depend on parallel signal transmission. Emphasis is placed on long-term consistency, ensuring reliable data output during continuous operation and under varying load conditions. The product has been adopted across multiple international markets and proven effective in diverse industrial settings. With a controlled manufacturing cycle of 15 working days, it supports predictable maintenance planning while helping users reduce unplanned downtime and extend the service life of existing equipment.


Technical data
| Sensor system | GaAlAs diodes, photo-transistor array |
| Resolution | 4096 positions / 360°; 8192 positions / 360° (optional); 3600 positions / 360° (optional) |
| Data Control - Bit (DCB) | Optional at ≤ 4096 positions |
| Disc coding | Gray or Gray - Excess |
| Measuring position deviation | ≤ ± 2'38'' at 4096 positions / 360°; ≤ ± 1'59'' at 8192 positions / 360° |
| Parallel output circuits | A = Open Collector Darlington; C = Open Emitter Darlington; D = Push - pull |
| Output frequency | 10 kHz max. |
| Latch | via signal input E1 |
| Enable circuit | on / off, via signal input E1 |
| Serial output circuit | E = SSI Differential to RS 422 / 485 |
| Output Code | Gray or Gray - Excess for non - binary outputs |
| Code sense | CW or CCW, via signal input E2 |
| Supply voltage range | +11 VDC to +30 VDC |
| Supply current (parallel) | 50 mA typ. / 70 mA max. |
| Supply current (serial SS) | 60 mA typ. / 80 mA max. |
| Operating speed | 3000 rpm max. (continuous); 4000 rpm max. (short period) |
| Angular acceleration | 10⁵ rad/s² max. |
| Inertial mass of rotor | 45 gcm² |
| Operating torque | ≤ 5 Nm (8 Nm - CBE 66) (at 1000 rpm) |
| Wind - up torque | ≤ 1 Nm (4 Nm - CBE 66) |
| Permissible axial and radial shaft load | 250 N max. |
| Bearing life expectancy | 10⁹ turns |
| Mass | 0.5 kg |