

We can deliver a customized replacement encoder for this multi-turn absolute feedback device, developed to align with the original unit’s mechanical installation and electrical operating conditions without referencing the original brand. The replacement is engineered based on the actual system layout, including shaft configuration, mounting interface, connector orientation, and environmental exposure. This ensures functional equivalence within the existing control system while still allowing targeted customization to meet on-site requirements.
From a technical perspective, this encoder operates as a multi-turn absolute position sensor with SSI Gray code output, suitable for deterministic data transmission in industrial automation networks. The replacement preserves the original communication structure and timing behavior on the SSI interface, ensuring compatibility with PLC and motion controllers already configured for this protocol. Absolute position information is provided with a resolution structure of 4096 steps per revolution combined with 4096 multi-turn counts, enabling accurate position tracking over extended motion cycles. The encoder supports a DC 10–32 V power supply, allowing stable operation in standard industrial power environments. Mechanical design elements, including shaft interface, bearing system, and housing rigidity, are matched to support high rotational speeds while maintaining resistance to shock and vibration in demanding applications.

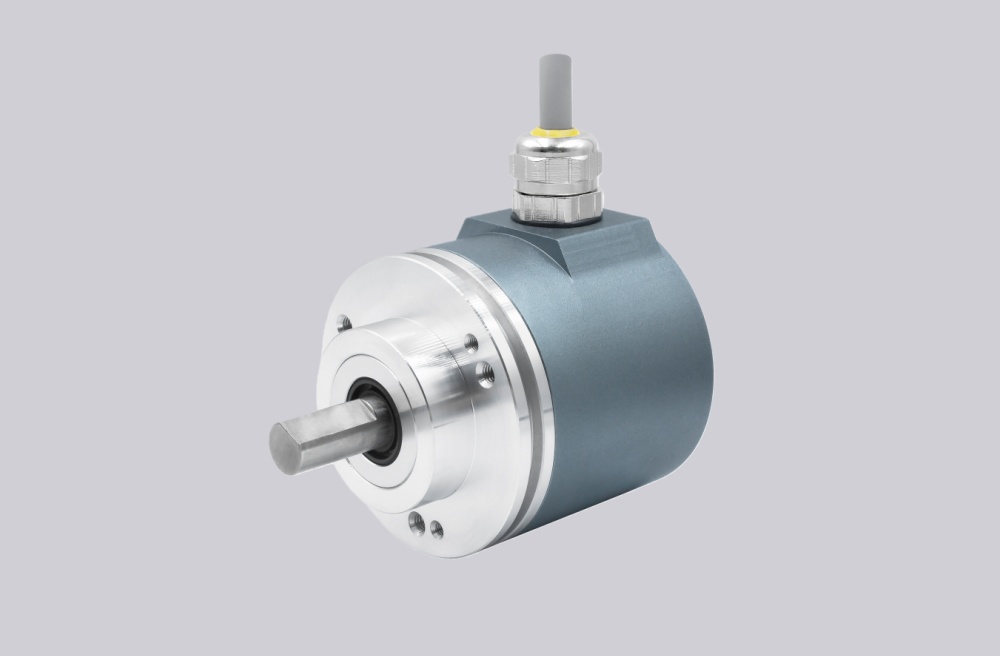
In practical use, this customized replacement encoder is suitable for machinery requiring reliable absolute position feedback during continuous operation. Typical applications include lifting systems, transfer mechanisms, automated storage equipment, and positioning axes where consistent accuracy and mechanical robustness are essential. By combining protocol compatibility with configurable mechanical and electrical features, the replacement solution offers dependable performance and long-term stability in industrial environments.
Technical data
| Parameter | Value | Unit |
| Max. permissible speed | 6000 | rpm^-1 |
| Permissible angular acceleration of rotor | 10^5 | rad \cdot s^-2 |
| Moment of inertia of rotor | 45 | gcm^2 |
| Max. starting torque at 25°C | 1 | Ncm |
| Max. load on shaft | ||
| - With standard shaft | axial: 50 / radial: 200 | N |
| - With expanding shaft | axial: 10 / radial: 20 | N |
| Service life of ball bearings (at 10 N axial/radial load @ 3000 $rpm^{-1}$) | 25000 | h |
| Vibration, sinusoidal 100 Hz | 100 | ms^-2 |
| Radial impacts on the flange within 10 ms | 300 | ms^-2 |
| Protection | See option concerned | - |
| Relative humidity | 95 | % |
| Temperature range | See option concerned | - |
| Weight | approx. 0.4 | kg |
| Parameter | Value | Unit |
| Max. step frequency | 100 | kHz |
| Supply voltage | 10 ... 32 | V |
| Max. power consumption | 3.7 | W |
| Angular error | $10^{-3}$ | rad |
| Pick-up code | Gray single-step | - |
| Transmitters | GaAlAs diodes | - |
| MTBF | $10^5$ | h |