

For systems originally specified with ROD 1931 2048 ID:689890-13 (LEM-009-2048), a 1:1 customized replacement encoder solution can be provided to preserve the original functional behavior and mechanical integration without requiring changes to the machine’s installation or control logic. This alternative is engineered to match the essential electro-mechanical characteristics of the ROD 1931 series, enabling direct installation into existing equipment during maintenance, upgrades, or retrofit projects.
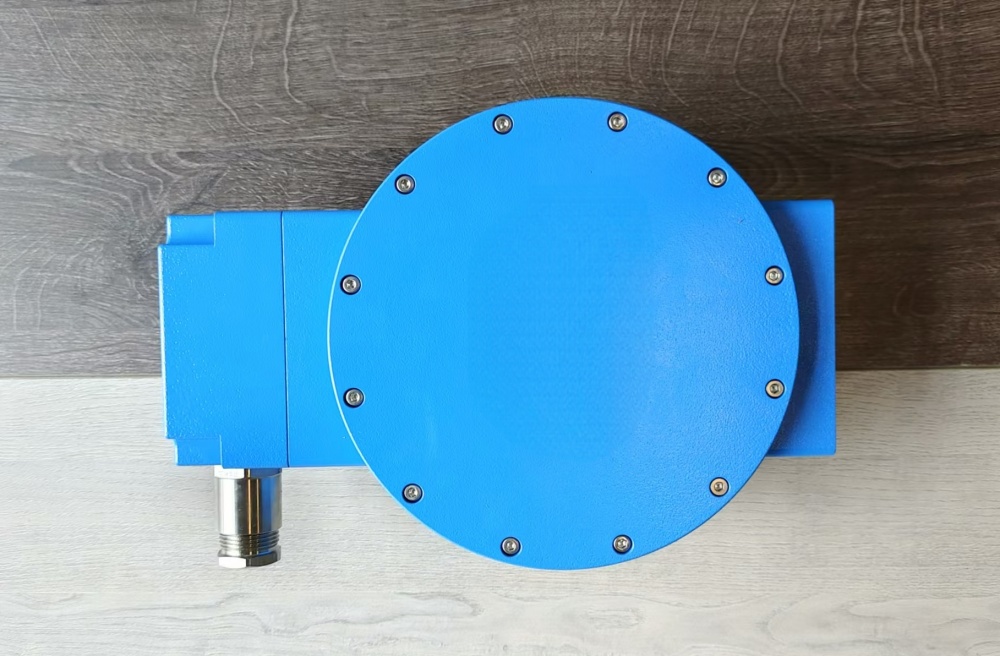
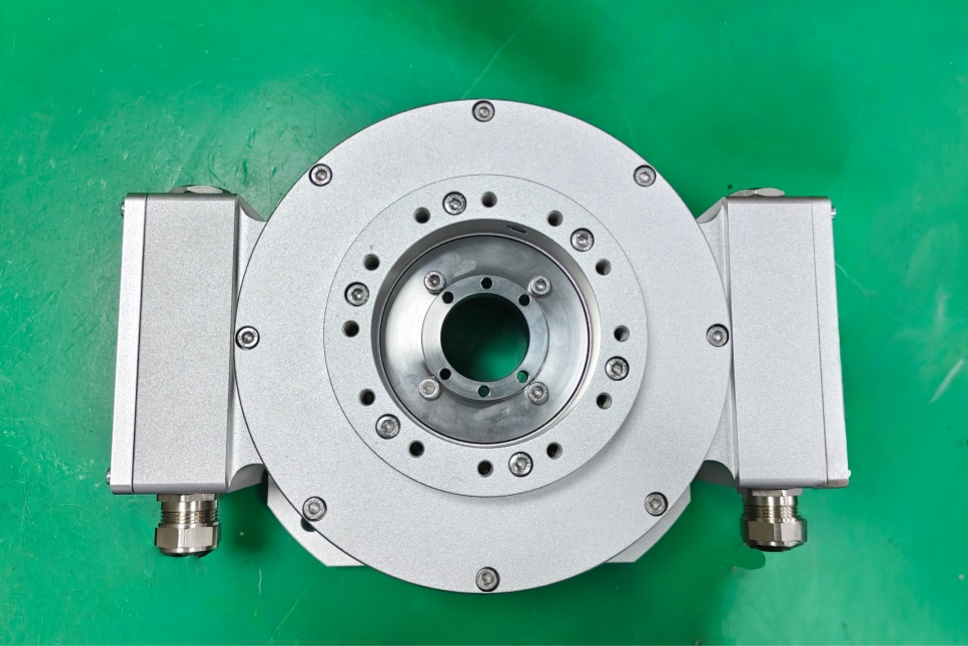
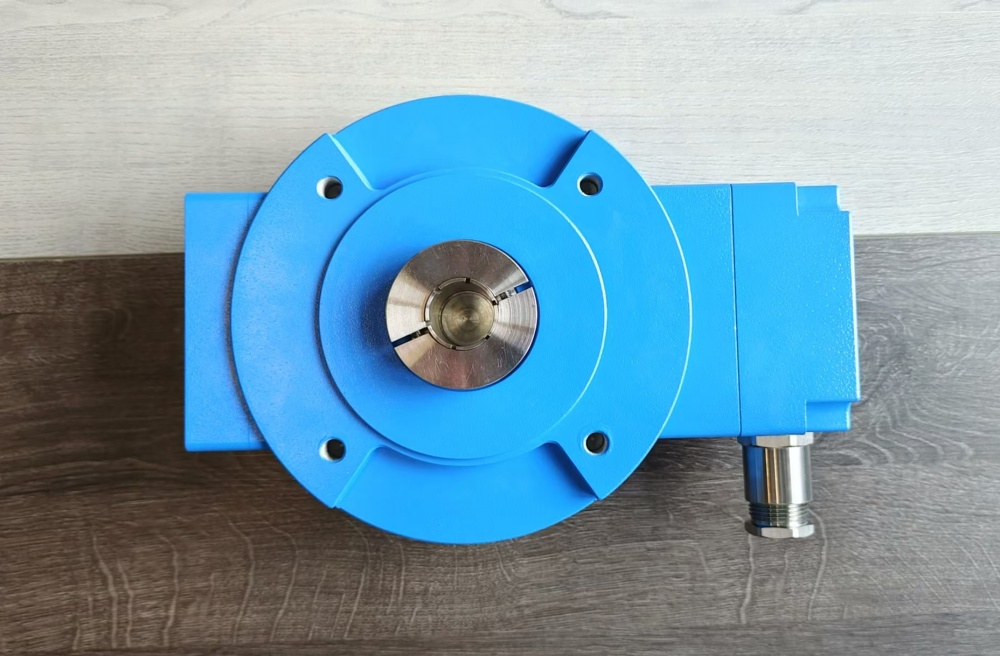
From an engineering standpoint, the replacement encoder is designed as an incremental rotary encoder with an output resolution of 2048 pulses per revolution (PPR), aligned with the original ROD 1931 specification. The signal interface is configured to provide industrial-standard incremental outputs (HTL/TTL or equivalent depending on system requirements), ensuring compatibility with PLCs, servo drives, and motion controllers that expect high-frequency incremental feedback. The replacement unit is built to operate reliably across typical industrial voltage ranges and is optimized for robust signal transmission over extended cable runs. Mechanically, the encoder’s shaft diameter, bearing arrangement, and housing form are selected to match the original dimensions, supporting continuous operation at elevated rotational speeds and reducing installation rework.
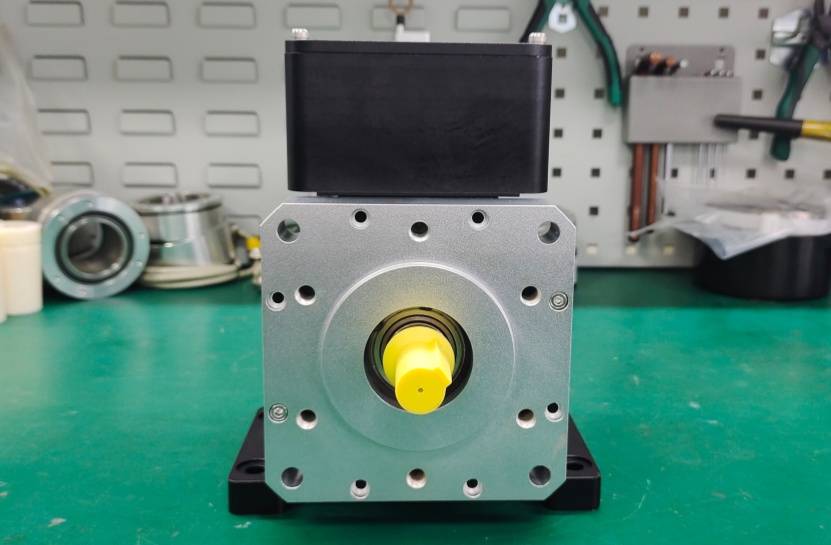
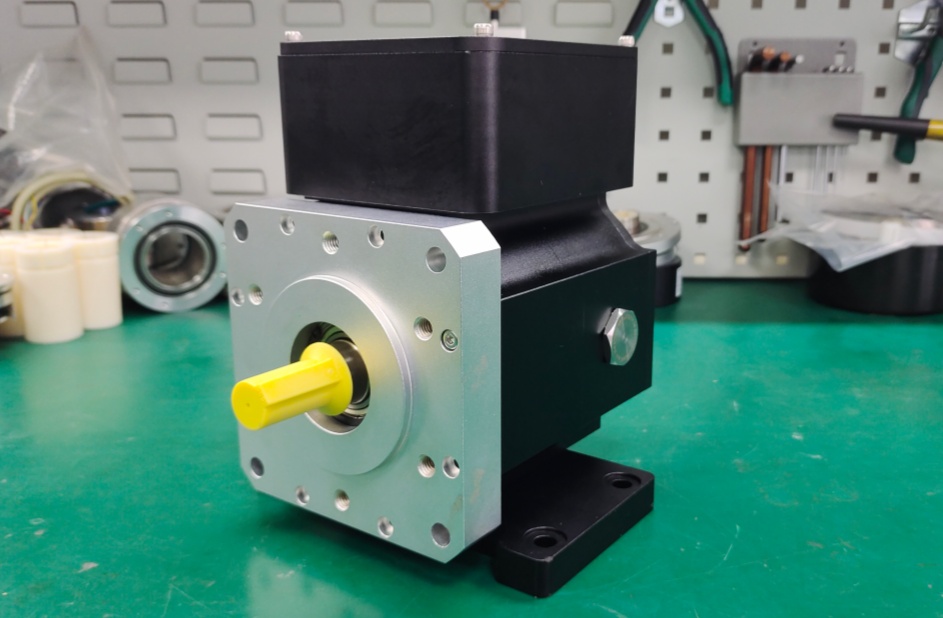
The mechanical design emphasizes structural integrity to withstand vibration and dynamic loading common in industrial environments. Bearings and housing materials are chosen to support stable motion feedback even under shock and vibration profiles encountered in machine tools, conveyors, and automated systems. With alignment to the original mounting interface and signal timing behavior, the ROD 1931 2048 replacement encoder delivers consistent incremental feedback suitable for demanding motion control applications where reliable rotation data is essential for positional accuracy and process stability.
Technical data
| Parameter | Specification |
| Model | ROD 1931 |
| Incremental signals | HTLs - C |
| Output pulse * | 600, 1024, 1200, 2400 |
| Scanning frequency | ≤100 kHz |
| Edge separation $a$ | ≥ 0.62 μs |
| System accuracy | ± 1/10SP |
| Power supply | 10.8V to 16.5V |
| Current consumption (without load) | ≤ 70 mA |
| Source / Sink max. | ≤ 40 mA |
| Electrical connection | Terminal board |
| Shaft | Solid shaft D = 15 mm |
| Mech. permissible speed n | ≤ 4000 min^-1} |
| Starting torque (at 20°C) | ≤0.05 Nm |
| Moment of inertia of rotor | 2.5⋅10−5 kgm^2 |
| Shaft load | Axial: 100 N, Radial: 100 N |
| Vibration (25 to 200 Hz) | ≤100 m/s^2 (JIS C 60 068-2-6, EN 60 068-2-6) |
| Shock (6 ms) | ≤1000 m/s^2 (JIS C 60 068-2-27, EN 60 068-2-27) |
| Max. operating temp. | 70°C |
| Min. operating temp. | -20°C |
| Protection EN 60 529 | IP66 |
| Weight | Approx. 4.5 kg |