

For systems built around the FG40KK-4096G-90G-NG, a custom compatible encoder solution can be engineered for maintenance support, retrofit execution, replacement planning, and upgrade work. Where the installed machine already relies on a two-terminal-box encoder with a higher-resolution incremental feedback structure, the compatible version can be developed around the original signal logic and installation concept, with a typical production lead time of 30 working days.
Technical Overview of the FG40KK-4096G-90G-NG Encoder
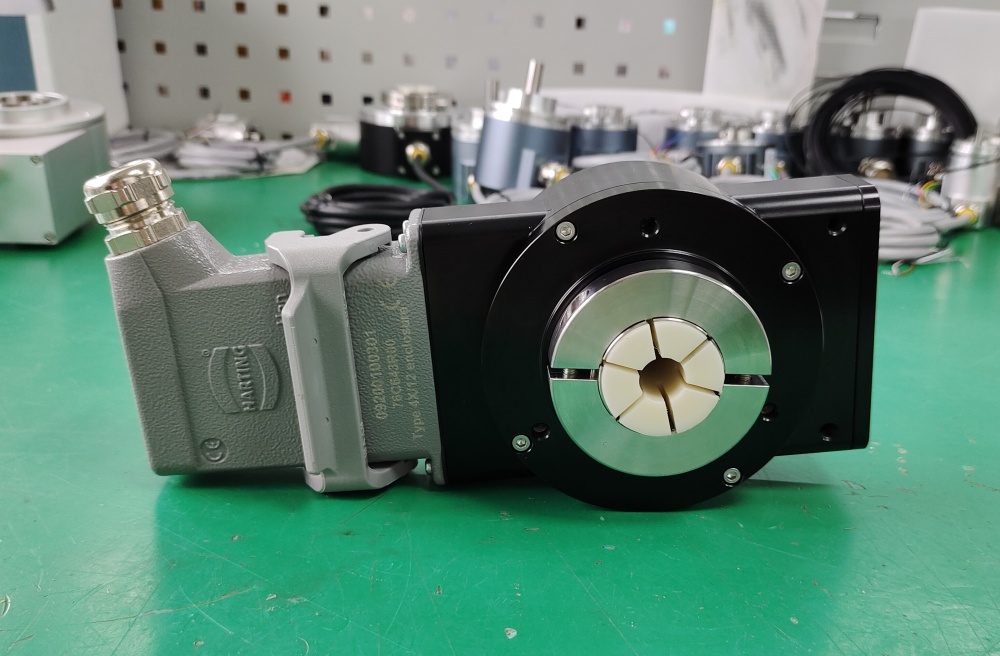
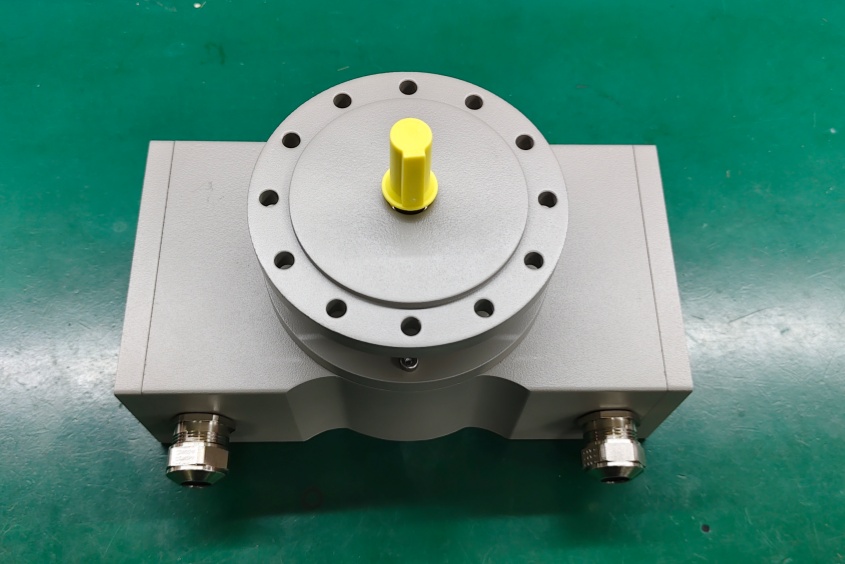
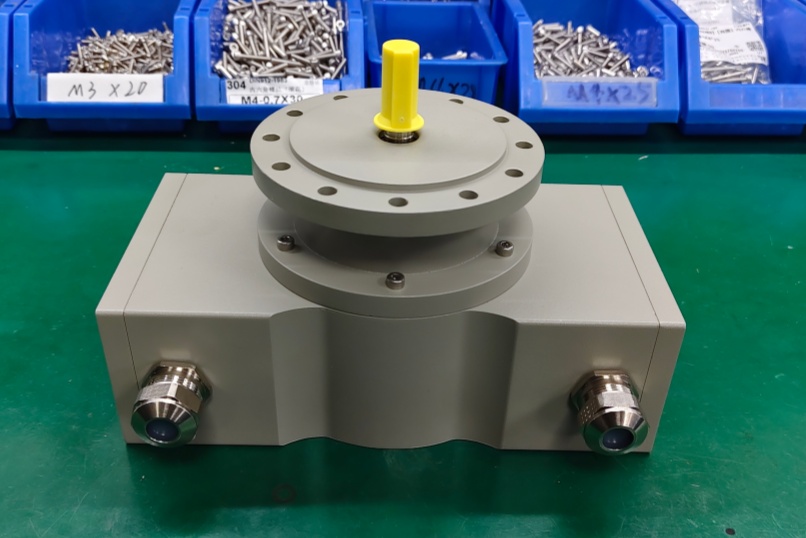
The FG40KK-4096G-90G-NG is an incremental encoder for rotary motion measurement in industrial drive and feedback systems. The latest FG 40 manual confirms that 4096 belongs to the special pulse-rate range of the series, while the electrical platform remains based on 12–30 V DC supply, a current-limited, short-circuit proof push-pull line driver with integrated impedance adaptation for 30 to 140 Ω lines, standard HTL output, optional 5 V TTL / RS422-compatible output, and a maximum frequency of 200 kHz.
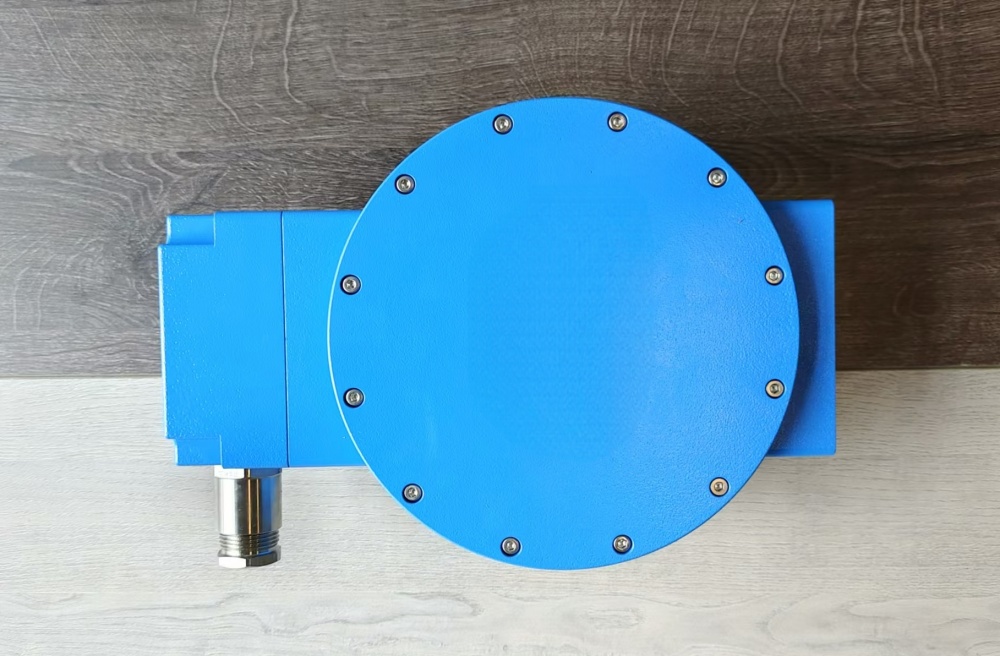
In this model code, 4096G defines a 4096 ppr configuration, while 90G indicates the basic square-wave output structure with channel 0° (A) and channel 90° (B), each with inverted signals. The NG code adds a mechanically defined reference pulse with inverted signal. The type-code section also states that KK means 2 terminal boxes, used as a redundant version or together with Option S, which gives this model a clear structural distinction from the single-box K version.
Because 4096 ppr sits in the special pulse-rate block, the signal tolerances follow the corresponding special-pulse specification. The manual gives a duty cycle tolerance of 1:1 ±5% and a square-wave displacement of 90° ±5% for special pulse rates up to 25000. That makes this version different in engineering emphasis from standard pulse-count models such as 1024, 1200, or 2048 ppr.
Industrial Integration Considerations
For this version, the main integration concern is maintaining signal stability at a higher pulse density than standard-resolution variants. A 4096 ppr encoder usually requires more careful review of controller input capability, counting margin, shielding quality, cable routing, and reference-pulse processing. In retrofit work, the receiving controller, counter module, or drive interface should therefore be checked before release so the compatible replacement remains aligned with the installed evaluation electronics.
The FG 40 manual also makes the installation side clear. Installation and commissioning must be performed by skilled technical staff only, and a hammer or similar tool must not be used because of the risk of damage to the bearings or coupling. During service life, couplings should be checked for free play or damage, fastening screws should remain tight, and the connection terminals should stay secure. These points become especially important where a high-resolution encoder is installed in a vibration-prone industrial drive section.
Custom Compatible Encoder Solution
For the FG40KK-4096G-90G-NG, a custom compatible encoder solution can be configured to match the original machine interface as closely as possible. The compatible design can be aligned with the required 4096 ppr signal structure, the two-terminal-box arrangement, the defined reference-pulse logic, the required output level, and the existing installation conditions so that changes to the surrounding equipment remain limited.
This approach is especially practical where the original control system already depends on a higher-resolution incremental feedback structure but the machine owner wants to keep the established wiring layout and maintenance logic. In those cases, the goal is not only physical replacement, but also continuity in signal behavior, field serviceability, and commissioning expectations.
Lead Time and Custom Development
Typical production lead time: 30 working days.
Before production, the engineering review should confirm the pulse count, output type, supply voltage, reference-pulse requirement, terminal-box arrangement, installation dimensions, controller input expectations, and field wiring conditions. Environmental conditions should also be reviewed, because the FG 40 manual states that sealing configuration affects permissible speed, breakaway torque, and temperature range. The series supports IP65, IP66, and IP66/IP67 depending on sealing arrangement, with special temperature ranges available beyond the standard range.
Typical Technical Parameters
| Parameter | Specification |
|---|---|
| Encoder Type | Incremental encoder |
| Resolution | 4096 ppr |
| Output Type | Square-wave incremental output |
| Signal Format | 0° / 90° channels with inverted signals, reference pulse with inverted signal |
| Supply Voltage | 12–30 V DC |
| Output Level | HTL, optional 5 V TTL / RS422-compatible |
| Output Driver | Current-limited, short-circuit proof push-pull line driver |
| Line Adaptation | Integrated impedance adaptation for 30 to 140 Ω lines |
| Max Frequency | 200 kHz |
| Duty Cycle | 1:1 ±5% for special pulse rates up to 25000 pulses |
| Phase Displacement | 90° ±5% for special pulse rates up to 25000 pulses |
| Connection Type | Terminal box connection |
| Terminal Box Arrangement | KK version, 2 terminal boxes |
| Protection Rating | IP65 / IP66 / IP66-IP67 depending on sealing arrangement |
| Application Orientation | Maintenance, retrofit, replacement, upgrade |